|
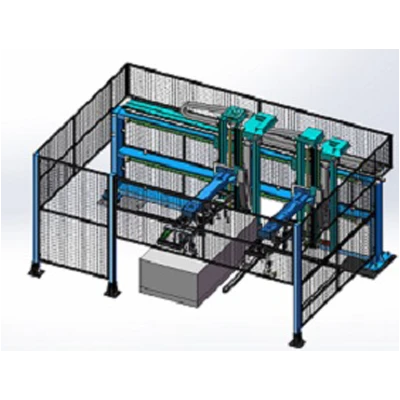
الوظيفة والمقدمة
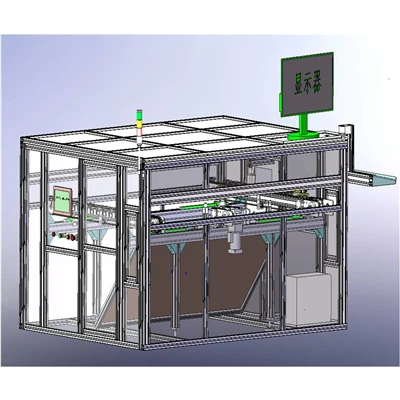
الاستيلاء على الزجاج ووضعه على خط النقل.
1. يتكون نظام تحميل الزجاج من ذراع روبوت متحرك زجاجي وذراع روبوت لالتقاط الورق.
2. تحتوي الآلة على محطتين لتخزين الزجاج ومحطة لتخزين الورق.
3. ذراع الروبوت المتحرك الزجاجي يضع الزجاج في خط النقل، وفي نفس الوقت يزيل ذراع الروبوت الآلي الورق.
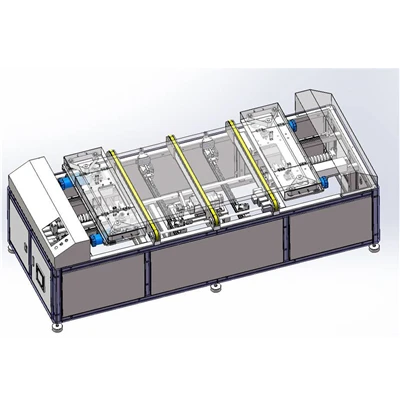
4. الآلة مدفوعة بمحرك مؤازر، يقوم المصاص بسحب الزجاج إلى المحطة المعينة.
5. ذراع الروبوت لتحميل الزجاج لديه هيكل ناتئ وذراع الروبوت لالتقاط الورق هو هيكل جسري.
المعلمة الرئيسية
تنسيق الوحدة: (1580-2000) مم*(800-1000) مم
دورة الزمن :<35s
Max capacity: >2468/يوم
المشغل عبر الإنترنت: لا يوجد
الطاقة المقدرة: 8.26 كيلو واط
الضغط: 0.7MPa+0.1
جهد الإدخال: 380 فولت
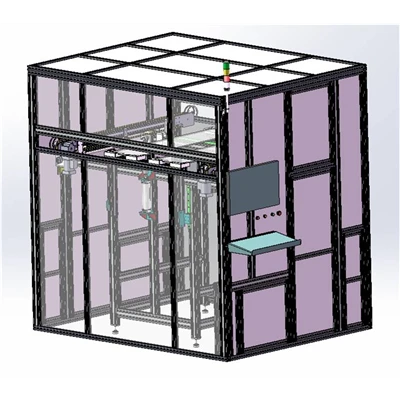
البعد: 4610 مم × 2780 مم × 2150 مم
ميزة
1. الآلة تستخدم الهيكل الفولاذي مع هيكل إطار اللحام، القوة العالية، الموثوقية والثبات أثناء التحميل.
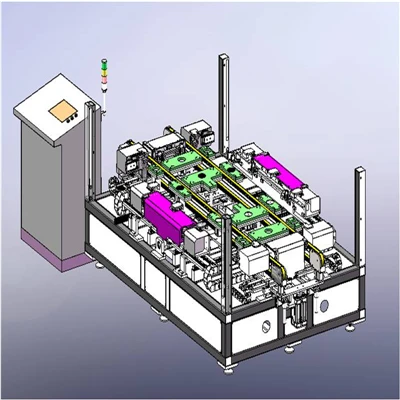
2. لوحة الشفط للحامل الزجاجي مصنوعة من مادة البولي يوريثين والتي لن تؤدي إلى طباعة على الزجاج أثناء التحميل.
3. محرك سيرفو دقيق ومستقر.
4. الآلة مجهزة بسياج أمان لضمان سلامة التشغيل.
5. تقليل عدم اليقين من التحميل من قبل المشغل، وتعزيز الإخراج.
6. الآلة أوتوماتيكية بالكامل ولا تتطلب أي تدخل بشري.
|